Reference the “How-To take off a leg” guide to reach the point where the leg is removed from the robot.
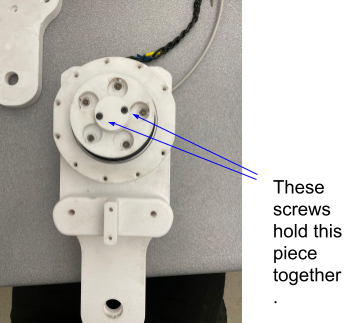
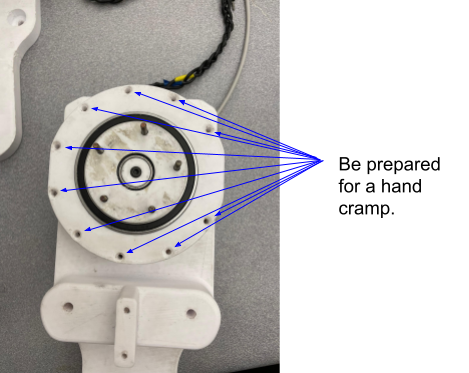
Remove the two screws holding the two halves together. On the same side, remove the two screws that hold the tension donuts in place (four screws total).
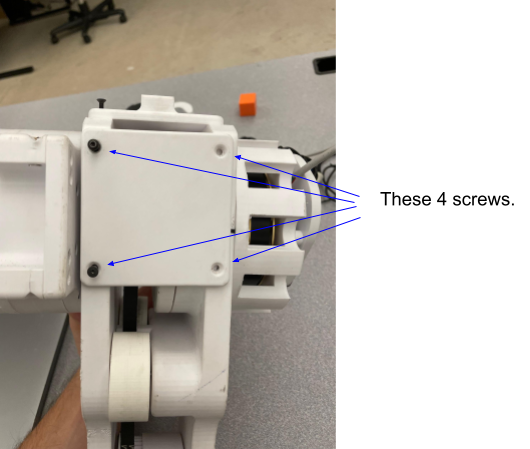
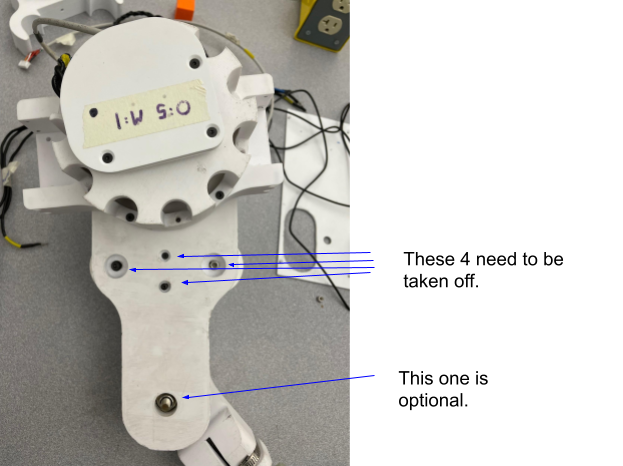
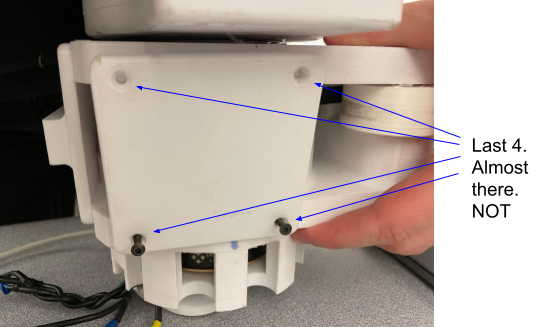
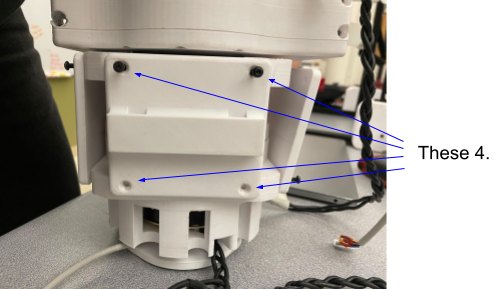
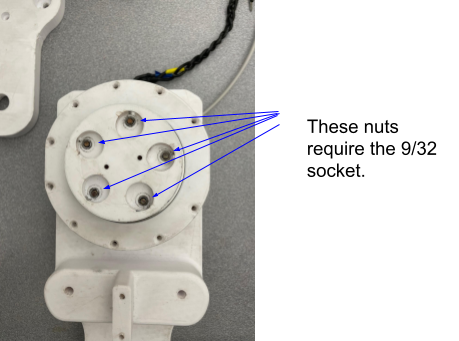
Remove the three plates at the top of the leg (each plate has four screws). The location of the plates is shown in Figures 2, 3, and 4. The order of removal does not matter.
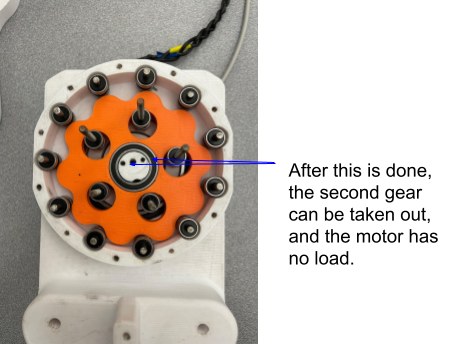
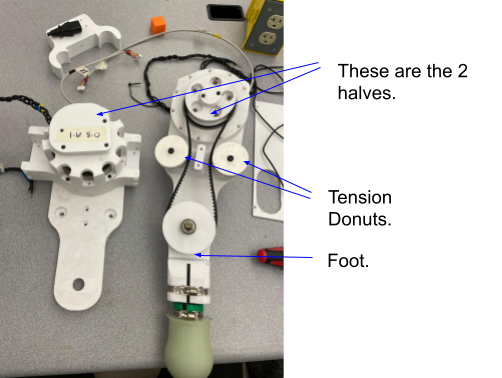
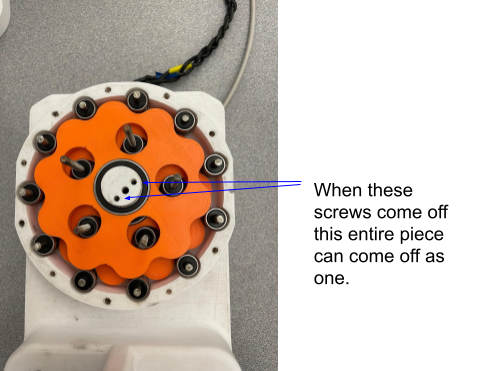
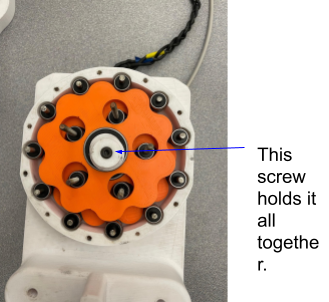
With the plates removed, take off the two halves. The two tension donuts and the foot should come off with the halves; see Figure 5. For the remaining steps we will examine the right half (the foot motor half).
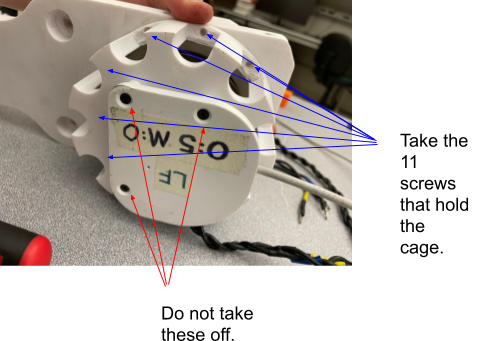
To remove the motor cage: you can reinstall the large cap taken off in step 7 to help prevent bearings from falling out. Alternatively, remove the cage before step 7 if needed by taking off the eleven screws on the back (Figure 12). Do not remove the encoder plate unless you intend to reinitialize encoders.
To fully disassemble, repeat steps 6–11 as needed for all subassemblies.
To reassemble, follow the steps in reverse order. Hand-tighten all bolts/screws (including when using a socket; hold the socket by hand). Overtightening can crack plastics and cause damage.